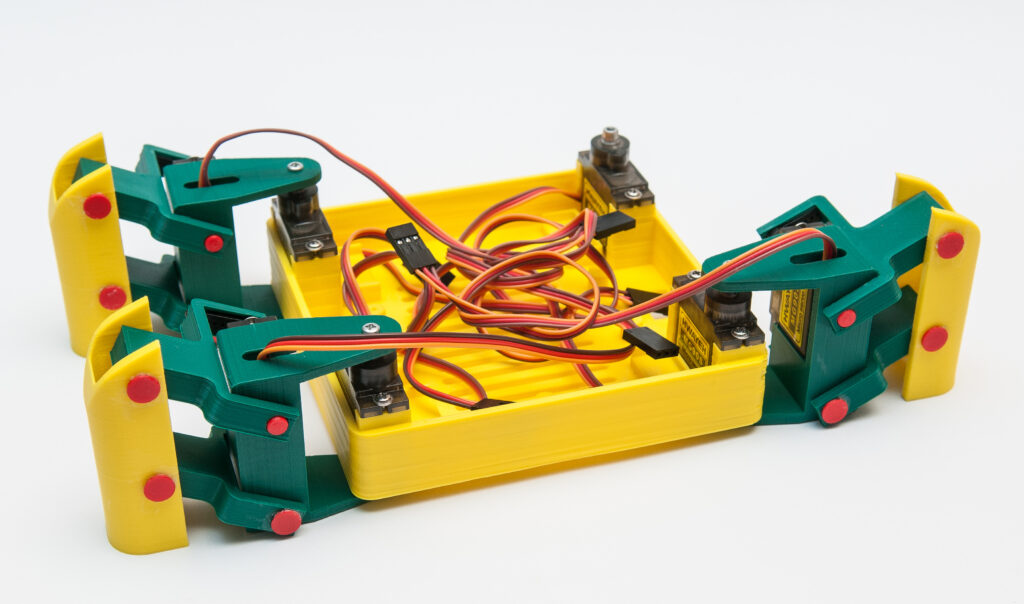
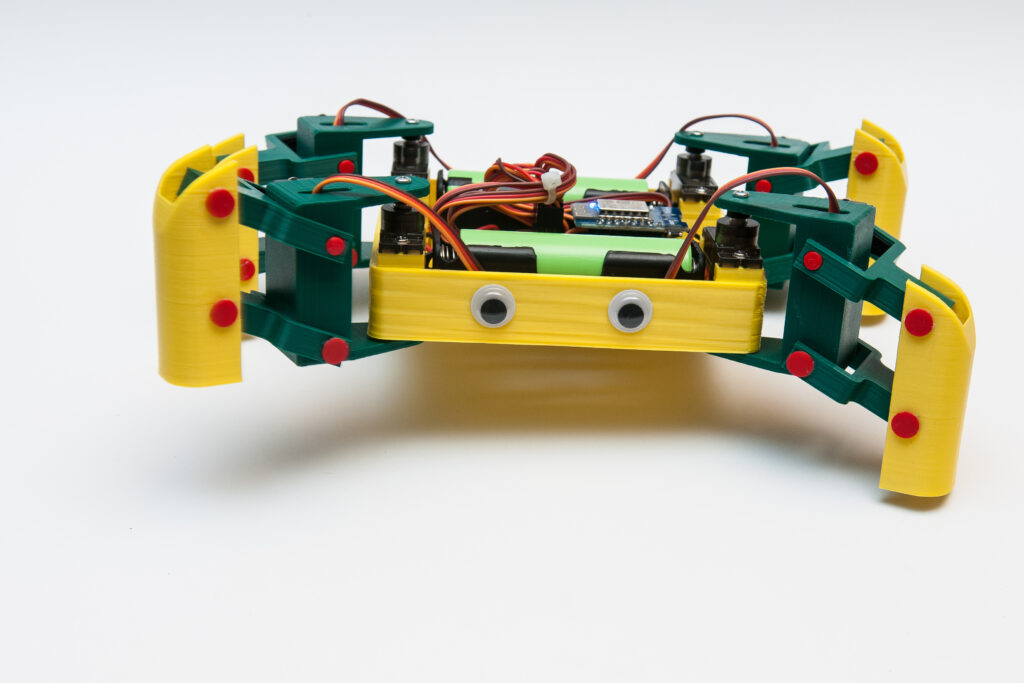
Voici un petit projet robotique très simple à réaliser : toutes les pièces sont réalisées en impression 3D, facile à imprimer et à assembler. Un petit Esp8266 permet de piloter les 8 servos moteur
Intro
Présentation
KANI est un proche cousin de KAME, autre robot quadrupède que l’on peut découvrir ici : https://www.thingiverse.com/thing:1265766
Un grand merci à bq3D (https://www.thingiverse.com/bq3D/about) pour son projet et sa source d’inspiration.
Mais le projet KANI se caractérise par quelques points intéressants :
- ➔ l’ensemble des pièces à été complètement redessiné afin de faciliter l’impression 3D :
- – en PLA,
- – sans structure de support,
- – sans bordure d’adhérence
- ➔ les fichiers sources sont disponible au format :
- – f3d (Autodesk Fusion360)
- – obj (format 3D d’import/export)
- – stl (pour l’impression 3D)
- ➔ Aucune vis n’est nécessaire pour le montage des articulations
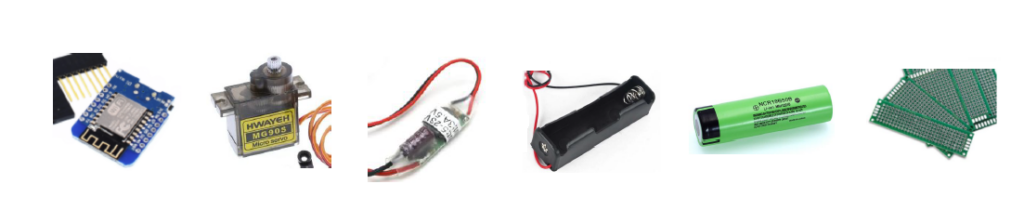
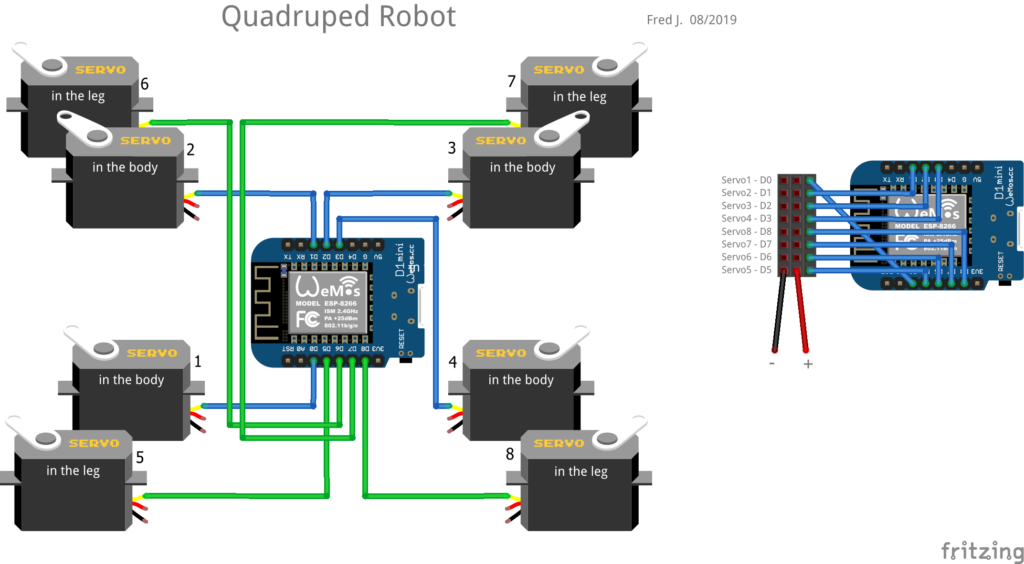
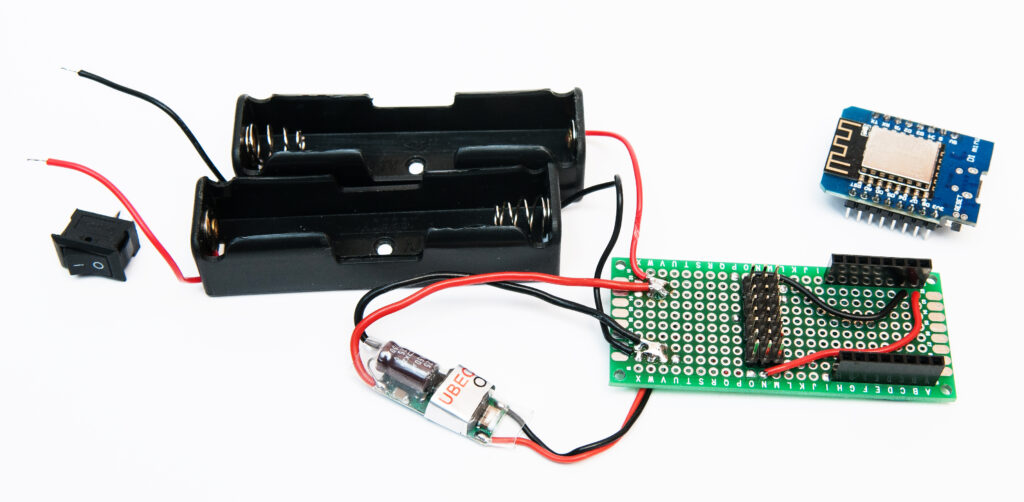
- ➔ Le robot est conçu autour d’un ESP8266 et avec 8 servos
moteurs de type MG90S, en métal, robustes et bon marché - ➔ L’ensemble est alimenté par 2 batteries Lithium NCR18650B
3,7V 3400mAh et d’un régulateur 5V UBEC pour une autonomie
de plus de 8 heures
L’ensemble de la documentation, fichiers 3D, code source, schémas, photos, est disponible ici : https://github.com/FredJ21/KANI_Quadruped_Bot
Réalisation des pièces mécaniques
Les pièces mécaniques sont réalisées en impression 3D en PLA, sans structure de support et sans bordure d’adhérence.
Les axes d’assemblage sont également réalisés en impression 3D
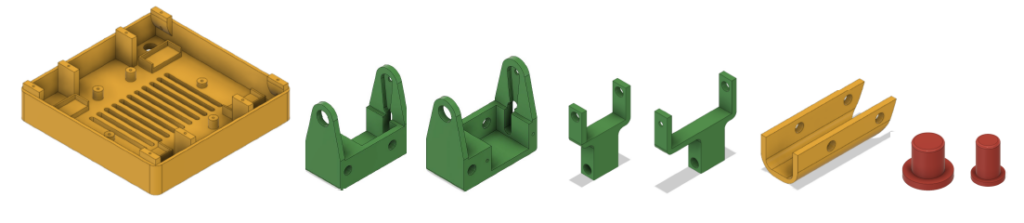
Liste des pièces :
Corps
Fichier : Body.stl
Quantité : 1
Support de jambe 1
Fichier : Leg_support_1.stl
Quantité : 2
Support de jambe 2
Fichier : Leg_support_2.stl
Quantité : 2
Articulation inférieure
Fichier : Lower_Articulation.stl
Quantité : 4
Articulation supérieure
Fichier : Upper_Articulation.stl
Quantité : 4
Jambe
Fichier : Leg.stl
Quantité : 4
Axe 8 mm
Fichier : Axle_8.stl
Quantité : 4
Axe 5 mm
Fichier : Axle_5.stl
Quantité : 28
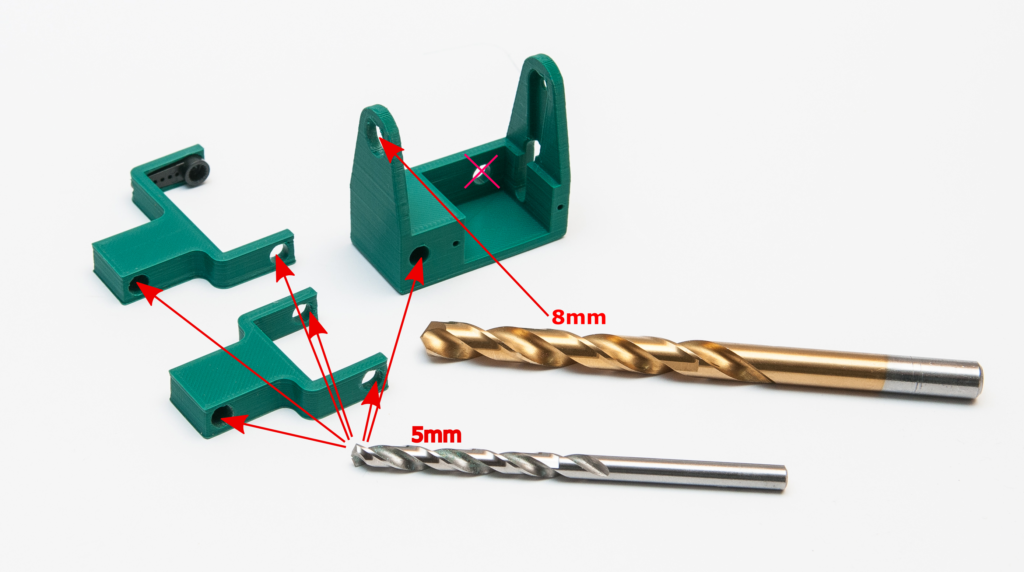
Préparation des pièces
Afin d’obtenir une faible de résistance mécanique lors des mouvements des jambes, certaines pièces doivent être re-percées à l’aide d’un foret de 5 mm ou 8 mm
Les axes de 5mm sont montés avec un léger point de colle juste en dessous de leur tête
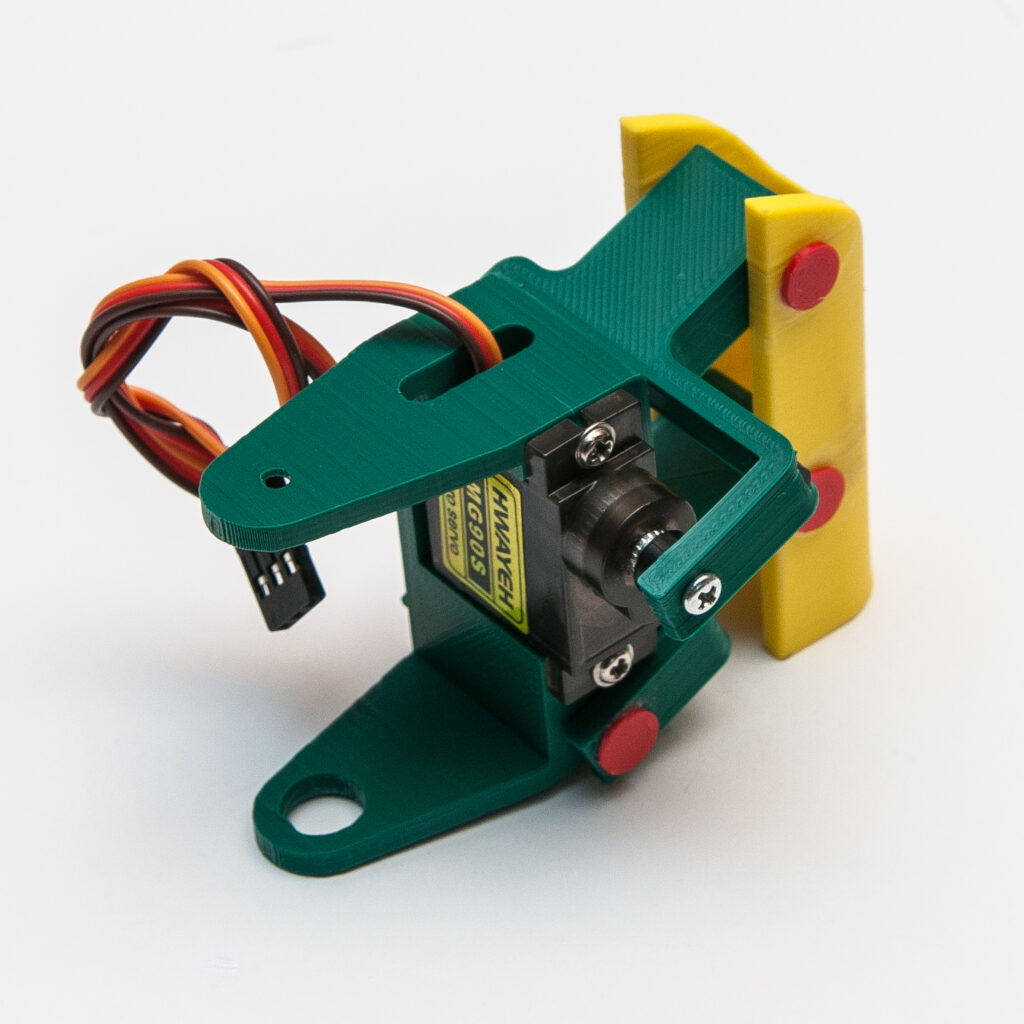
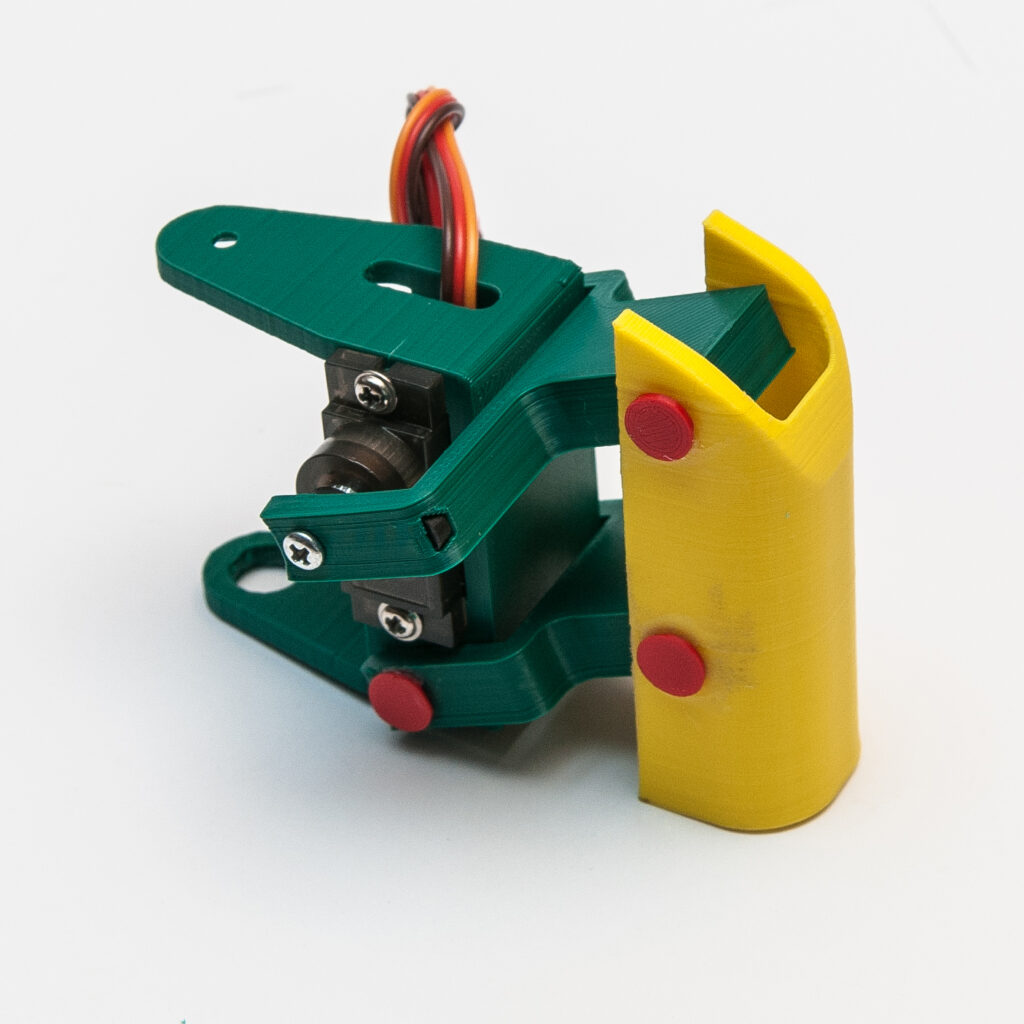
Assemblage des jambes
Les axes de 5mm sont montés avec un léger point de colle juste en dessous de leur tête