Présentation :
La carte « MotorDriverHat » est une carte d’extension pour Raspberry PI 3 ou 4, permettant de piloter 2 moteurs à courant continue de forte puissance (* voir plus bas), des servos moteurs, et d’autres périphériques via les Gpio.
Elle propose une connectivité pour les besoins en alimentation électrique et pour le raccordement des moteurs, ainsi que de multiples entrées/sorties GPIO, facilitant, par exemple, l’utilisation de servomoteurs.
Principales caractéristiques :
- entrée d’alimentation 5V pour la Raspberry
- entrée d’alimentation 5 à 7V pour les servomoteurs
- entrée d’alimentation 6 à 27V pour les moteurs
- 2 ponts en H composés de 4 BTS7960 (43 Ampères)
- Leds de contrôle du sens de rotation
- 6 entrées/sorties GPIO PWM avec alimentation servos moteurs
- 4 entrées/sorties GPIO+Gnd (accessoires) + Led
- 2 sorties amplifiées via MOSFET
- connecteur I2C
- buzzer (bip bip)
- bouton poussoir
Les atouts notables de cette carte sont donc : la séparation des alimentations RPI/Motor/Servos et l’intégration de deux ponts en H puissants, le tout sur une surface réduite.
Important : même si les BTS7960, des deux ponts en H, supportent un courant de plus de 40 ampères , il n’est pas envisageable d’utiliser la carte « MotorDriverHat » à une telle intensité de courant.
La limite de courant admissible est principalement due à la taille et l’épaisseur des pistes de cuivre du PCB , ainsi qu’à l’absence de dissipateur thermique sur les composants actifs.
Remarque importante : le 0 Volt (GND) est commun à l’ensemble des alimentations
TODO: il sera nécessaire de réaliser encore quelques tests pour déterminer les limites d’utilisation des ponts en H et des Mosfet tests
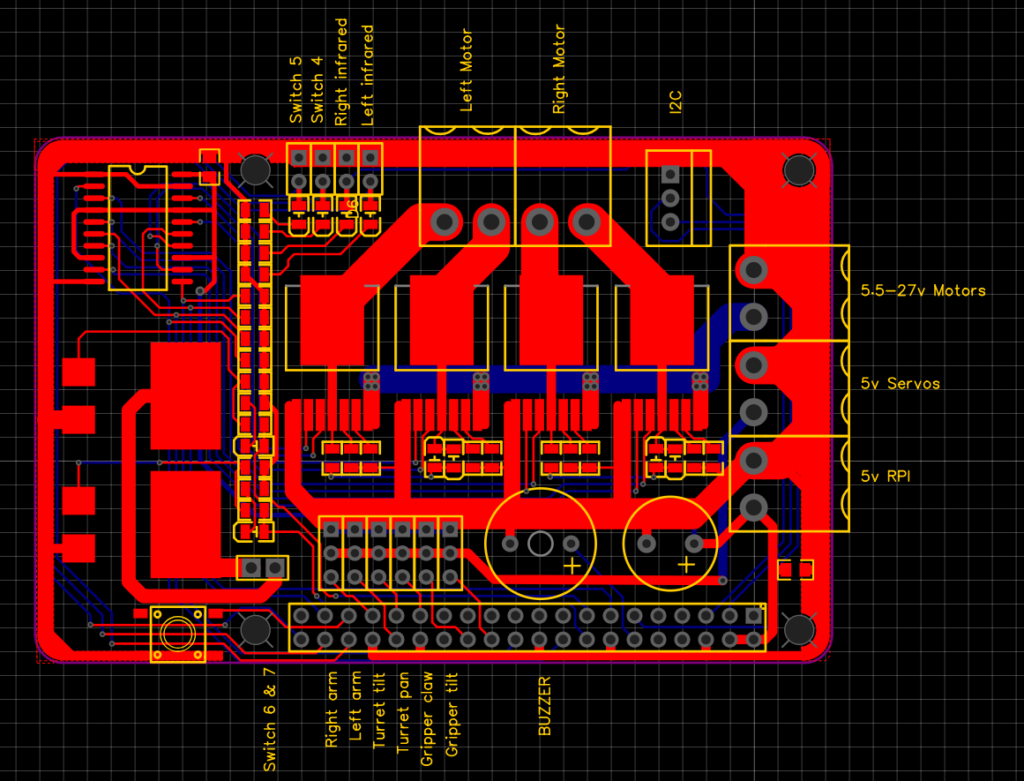
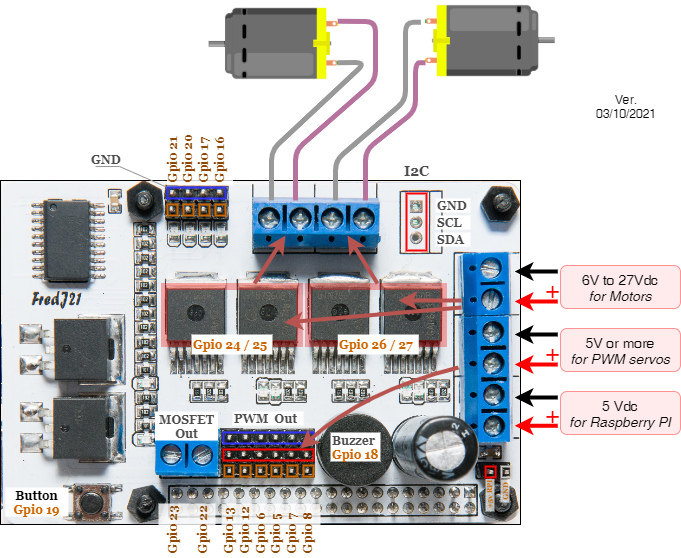
Repérage des points de raccordement
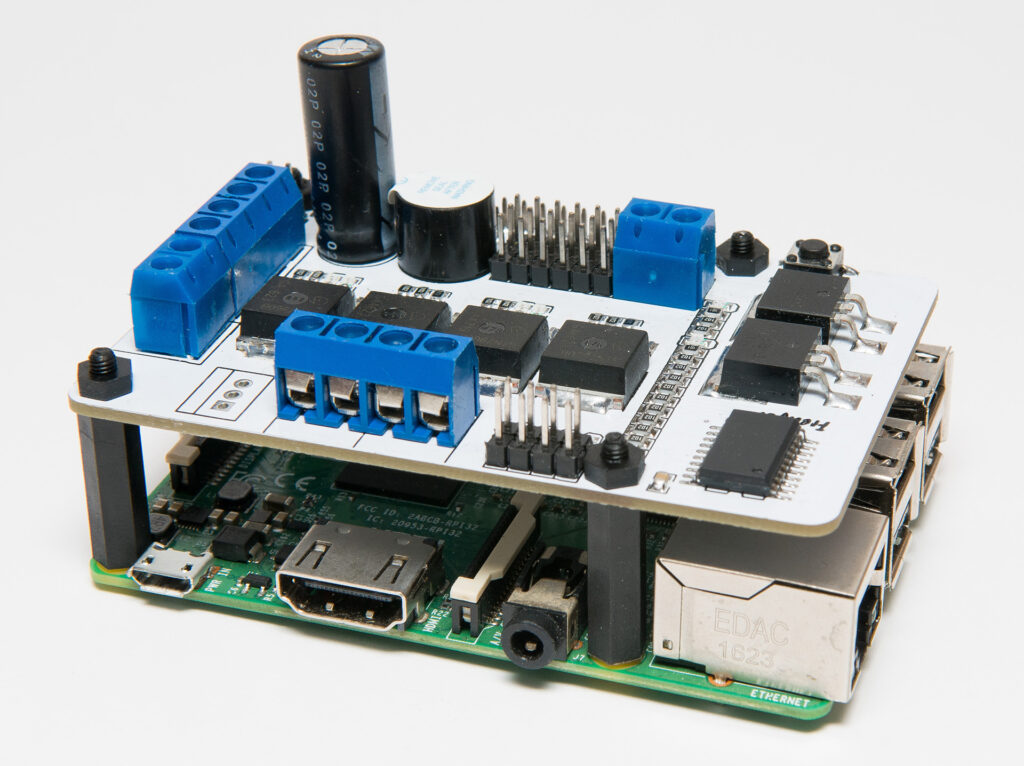
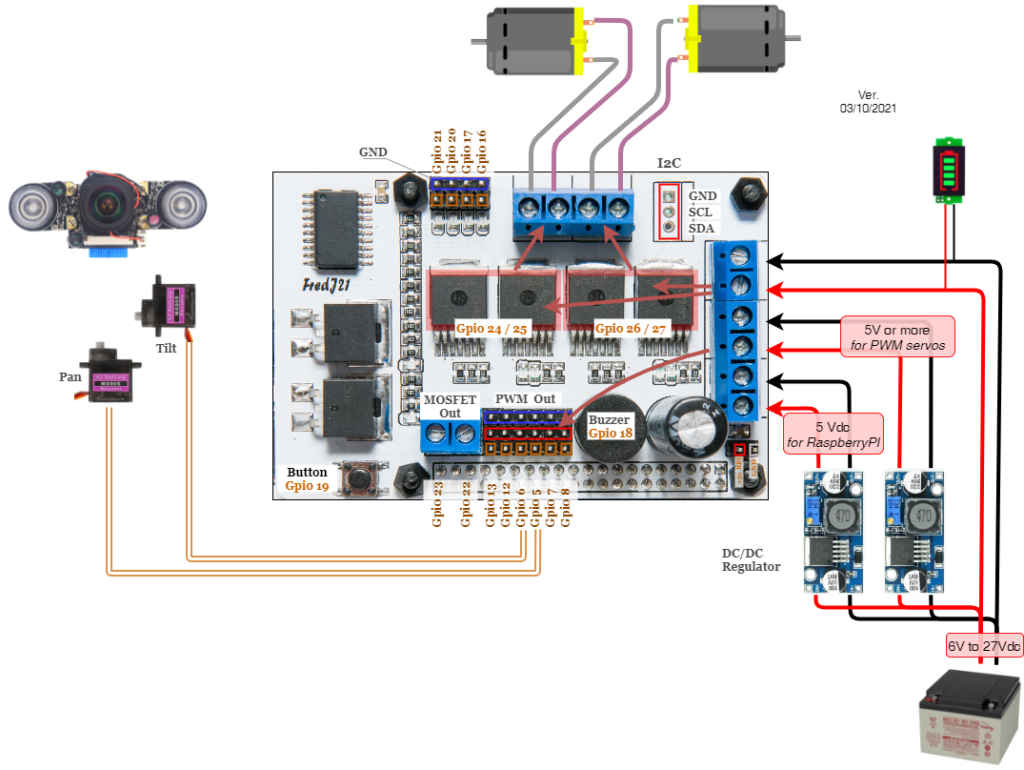
Exemple d'utilisation
Cette exemple utilise deux régulateurs DC/DC de type « UBEC »
- 5V pour la Raspberry
- 5V (ou légèrement plus) pour les sorties PWM des servos moteurs
La batterie est également raccordée directement à la carte pour alimenter les moteurs au travers des deux ponts en H.
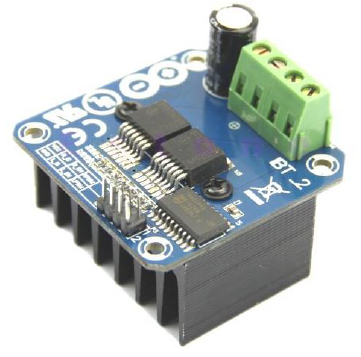
Les sorties moteurs CC - H Bridge BTS7960 - IBT_2
La carte « MotorDriverHat » reprend l’architecture du module Arduino IBT_2. Elle est l’équivalent à 2 ponts en H IBT_2 qui permettent à la Raspberry de piloter 2 ou 4 moteurs à l’aide de signaux PWM.
– Input Voltage: 6 ~ 27Vdc.
– Driver: Dual BTS7960 H Bridge Configuration.
– Peak current: 43-Amp.
– PWM capability of up to 25 kHz.
– Control Input Level: 3.3~5V.
– Control Mode: PWM or level
– Over-voltage Lock Out.
– Working Duty Cycle: 0 ~100%.
– Under-voltage Shut Down.
Les caractéristiques techiques du module IBT_2 sont disponible ici: BTS7960_IBT_2_Datasheet.pdf
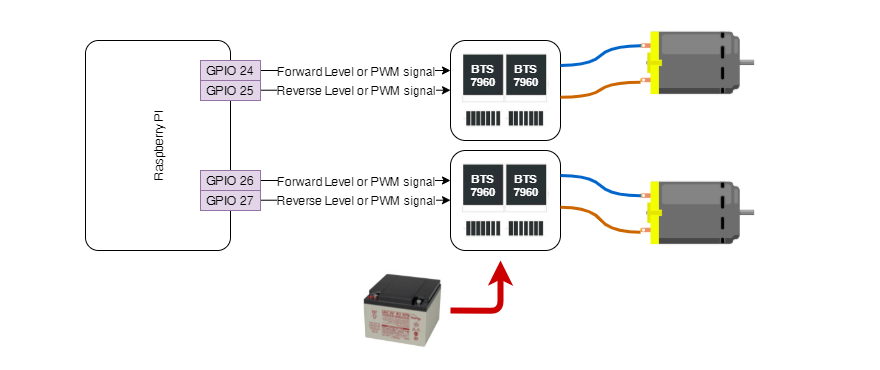
Sorties Raspberry PI utilisées pour les moteurs:
- GPIO 24 / 25
- GPIO 26 / 27
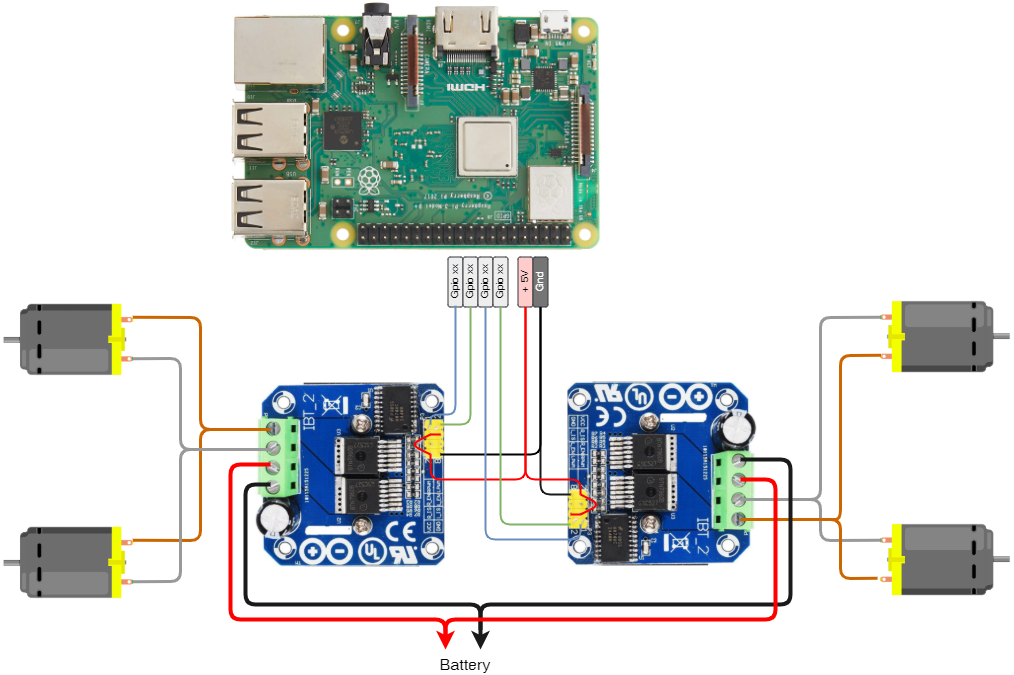
L’étage de puissance de la carte « MotorDriverHat », basé sur 2 ponts en H, peut donc être représenté de la manière simplifiée suivante:
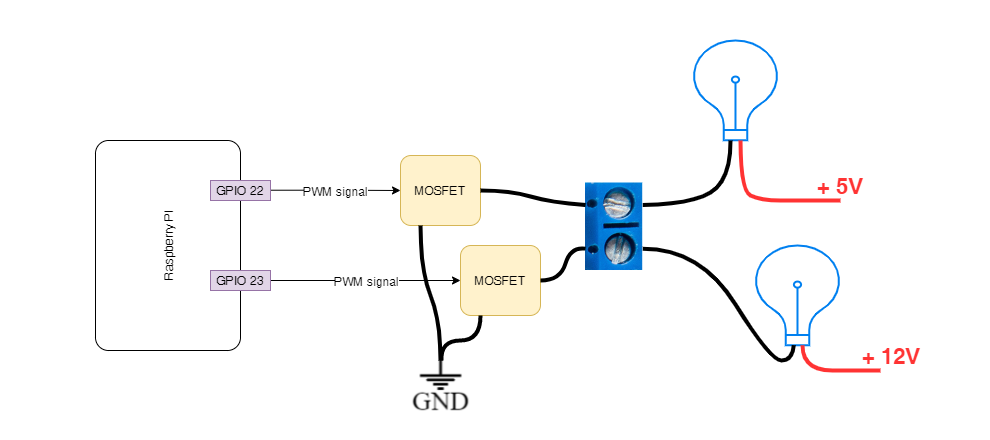
Les sorties amplifiées - MOSFET
La carte « MotorDriverHat » est équipée de deux sorties amplifiées par des MOSFET de type IRFZ44 MOSFET_IRFZ44_datasheet.pdf.
Ce transistor à effet de champ est de type N-Channel, et est donc relié au 0v (GND) commun à l’ensemble des alimentations. Il pourra piloter des équipements fonctionnant sur diverses tensions électriques.
Remarque : il bien evidement possible d’utiser un MOSFET Type N d’une autre référence
Sorties Raspberry PI utilisées pour les Mosfet:
- GPIO 22 & 23
Représentation simplifiée :
Utilistation avec Vigibot.com
La carte « MotorDriverHat » à été conçue pour fonctionner très simplement sur Vigibot.com, avec une configuration quasi par défaut.
Plus d’info ici –> docs/vigibot.md
Schema global
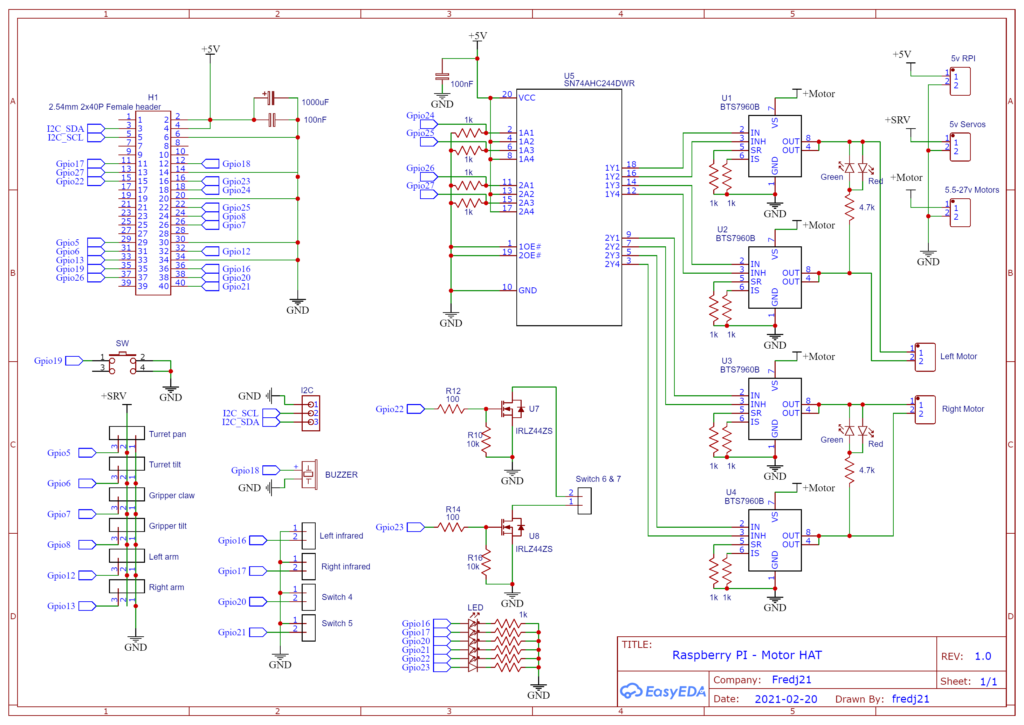
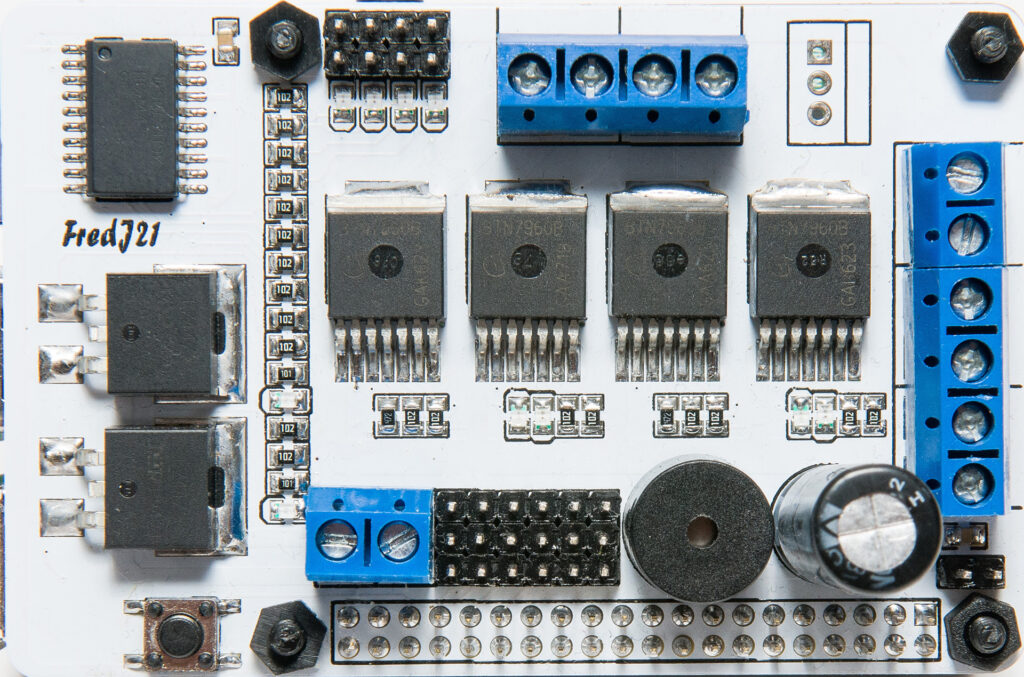
PCB