4ème partie : entrainement du réseau de neurones sur une gros PC puissant !
Je vous propose de partager mon retour d’expérience sur la mise en œuvre d’une intelligence artificielle avec le nouveau module HAILO 8 (ou HAILO 8L) intégré dans un Raspberry PI5, capable de reconnaître et différencier divers objets personnels.
Le principe repose sur l’entraînement automatique d’un réseau de neurones, en utilisant les outils YOLO et le compilateur HAILO, à partir d’un ensemble de données constitué d’un certain nombre d’images (le « DataSet »).
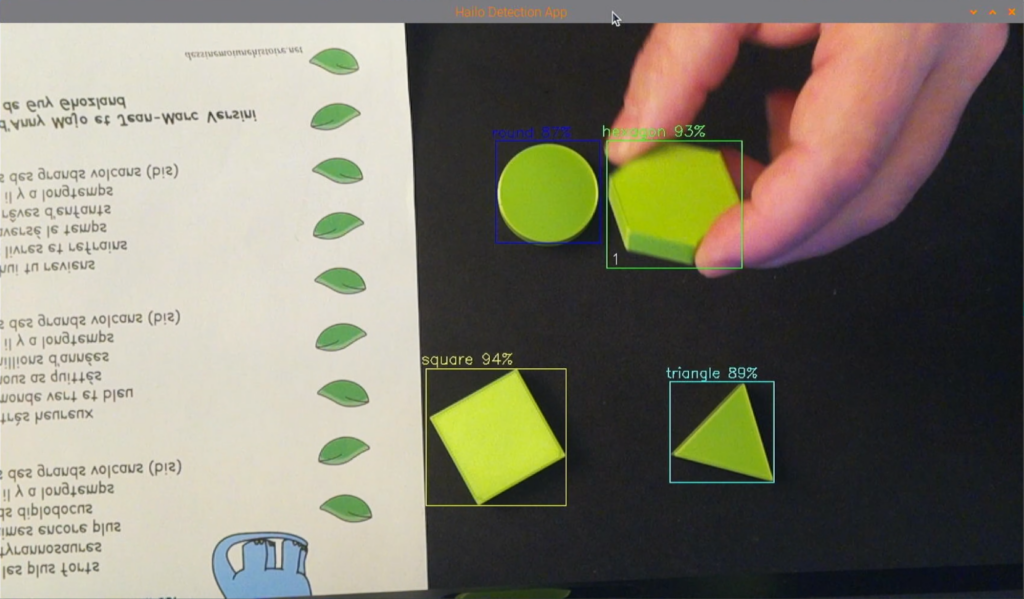
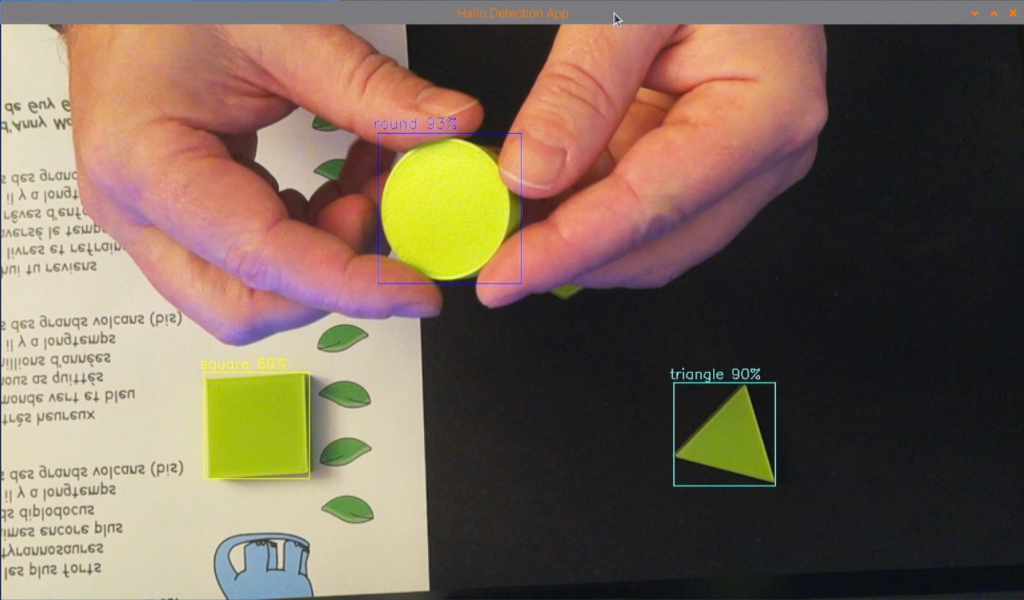
Ce réseau de neurones sera ensuite capable d’identifier, avec un taux de certitude donné, les objets pour lesquels il a été entraîné, que ce soit sur des images statiques ou sur un flux vidéo.
Cet article, consacrée à la mise en œuvre d’une intelligence artificielle embarquée sur un Raspberry Pi 5, est composé de 5 grands chapitre :
- Partie 1 : Introduction
- Partie 2 : Config & Tests
- Partie 3 : Créer son jeu de données
- Partie 4 : Entraînement du modèle IA
- Partie 5 : Conversion et Déploiement du modèle
Partie 4 : Entraînement du modèle IA
Pour réaliser l’apprentissage de notre modèle, plus solutions se présente à nous :
- 👉 entraîner le modèle en local, sous linux
- 👉 ou utiliser un service en ligne, dans le cloud, sur Google Colab (non traité ici)
Entraînement du modèle sous linux
il ne sera pas possible de réaliser cette étape directement sur un Raspberry PI
En effet, l’entraînement de l’IA nécessite beaucoup de calculs et donc de ressources (mémoire/cpu/gpu),
il est fortement recommandé d’utiliser un PC puissant équipé d’une bonne grosse carte GPU
Cette solution est techniquement très intéressante et mais surtout très chronophage !!! car elle nécessite pas mal de configuration sous Linux pour installer l’ensemble des outils et leurs dépendances !
MAIS, fort heureusement HAILO propose des environnements pré-configurés sous forme de conteneur Docker
L’environnement Docker s’installe et s’utilise en quelques lignes :
git clone https://github.com/hailo-ai/hailo_model_zoo.git
cd hailo_model_zoo/training/yolov8
docker build --build-arg timezone=`cat /etc/timezone` -t yolov8:v0 .
docker run --name "yolov8" -it --gpus all --ipc=host -v /data_1:/data yolov8:v0
Dans le DOCKER YOLOv8
Nous voila dans le conteneur Docker Yolo8 !!!
A noter que le répertoire /data du conteneur est mappé avec le répertoire /data_1 de la machine Linux hôte
–> cela permettra d’extraire les résultats des traitements
Nous pouvons dans, un premier temps, vérifier détection correcte de la carte vidéo et des drivers CUDA
$ nvidia-smi
Sun Feb 2 15:08:44 2025
+-----------------------------------------------------------------------------------------+
| NVIDIA-SMI 550.120 Driver Version: 550.120 CUDA Version: 12.4 |
|-----------------------------------------+------------------------+----------------------+
| GPU Name Persistence-M | Bus-Id Disp.A | Volatile Uncorr. ECC |
| Fan Temp Perf Pwr:Usage/Cap | Memory-Usage | GPU-Util Compute M. |
| | | MIG M. |
|=========================================+========================+======================|
| 0 NVIDIA GeForce RTX 4070 ... Off | 00000000:01:00.0 On | N/A |
| 0% 42C P2 41W / 285W | 418MiB / 16376MiB | 0% Default |
| | | N/A |
+-----------------------------------------+------------------------+----------------------+
+-----------------------------------------------------------------------------------------+
| Processes: |
| GPU GI CI PID Type Process name GPU Memory |
| ID ID Usage |
|=========================================================================================|
+-----------------------------------------------------------------------------------------+
Ensuite , nous allons créer 2 répertoires
- l’un pour le Dataset
- l’autre pour les résultats des traitements
mkdir /data/my_dataset
mkdir /data/my_yolo8s
Récupération (téléchargement) de notre Dataset
Comme nous l’avons vu plus haut, il existe plusieurs méthodes pour retrouver son Dataset précédemment créé sur Robotflow
Une des méthodes les plus simples est d’utiliser la commande « curl » :
apt install curl unzip
cd /data/my_dataset
curl -L "https://app.roboflow.com/ds/MtF5ewIPDd?key=DtuQjJYrBl" > roboflow.zip; unzip roboflow.zip; rm roboflow.zip
root@50b81f5f3e9f:/data/my_dataset# ls -l
-rw-r--r-- 1 root root 150 Jan 24 13:16 README.dataset.txt
-rw-r--r-- 1 root root 1190 Jan 24 13:16 README.roboflow.txt
-rw-r--r-- 1 root root 299 Jan 24 13:16 data.yaml
drwxr-xr-x 4 root root 4096 Jan 24 13:16 test
drwxr-xr-x 4 root root 4096 Jan 24 13:16 train
drwxr-xr-x 4 root root 4096 Jan 24 13:16 valid
YOLO - Entrainement
VOILA !!! Nous y sommes !!! … nous allons maintenant lancer le traitement d’apprentissage de notre IA
cd /data/my_yolo8s
yolo task=detect mode=train model=yolov8s.pt data=/data/my_dataset/data.yaml epochs=100 batch=8
👉 Objectif : Entraîner le modèle YOLOv8 sur notre dataset personnalisé pendant 100 époques avec une taille de batch de 8.
Nous utilisons yolov8s.pt comme modèle de départ pour apprend à détecter les objets.
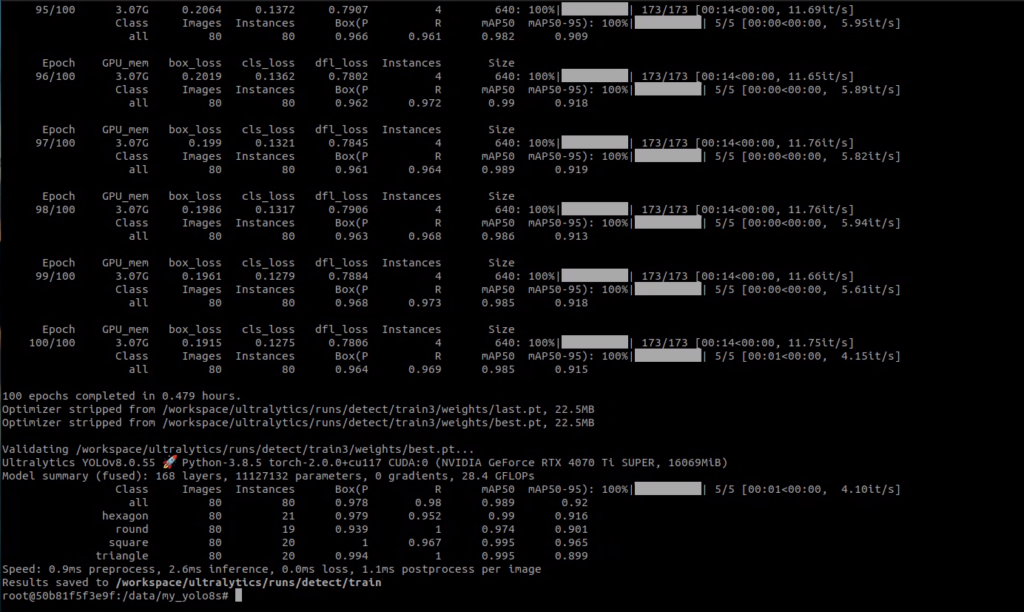
… et après un certain temps, parfois plusieurs heures ….. ( ici, un peu moins d’une heure)
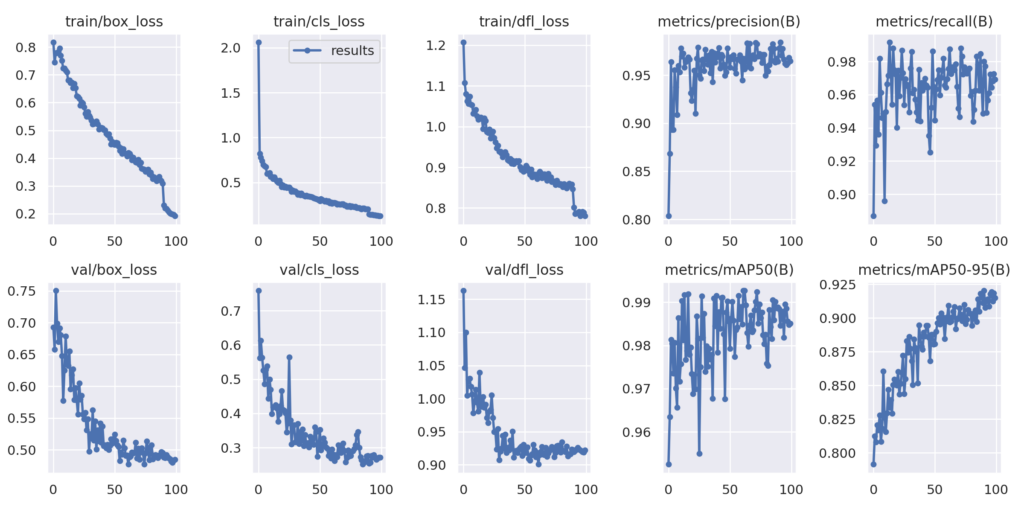
Notre IA est là !
- les graph des données statistiques sont générés
- le réseau de neurones que nous allons exploiter est dans fichier best.pt
root@50b81f5f3e9f:/data/my_yolo8s# ls -l /workspace/ultralytics/runs/detect/train/weights/
total 43968
-rw-r--r-- 1 root root 22510584 Feb 2 15:52 best.pt
-rw-r--r-- 1 root root 22510584 Feb 2 15:52 last.pt
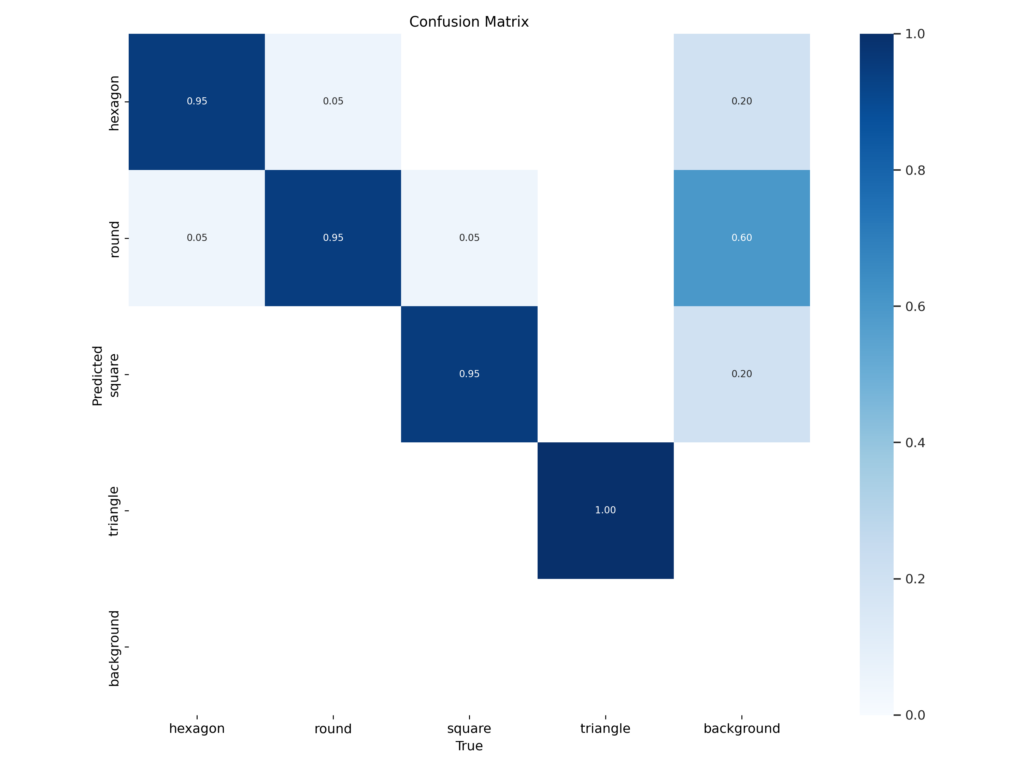
YOLO - Validation
yolo task=detect mode=val model=/workspace/ultralytics/runs/detect/train/weights/best.pt data=/data/my_dataset/data.yaml
👉 Objectif : Tester la performance du modèle best.pt sur les images de validation définies dans data.yaml.
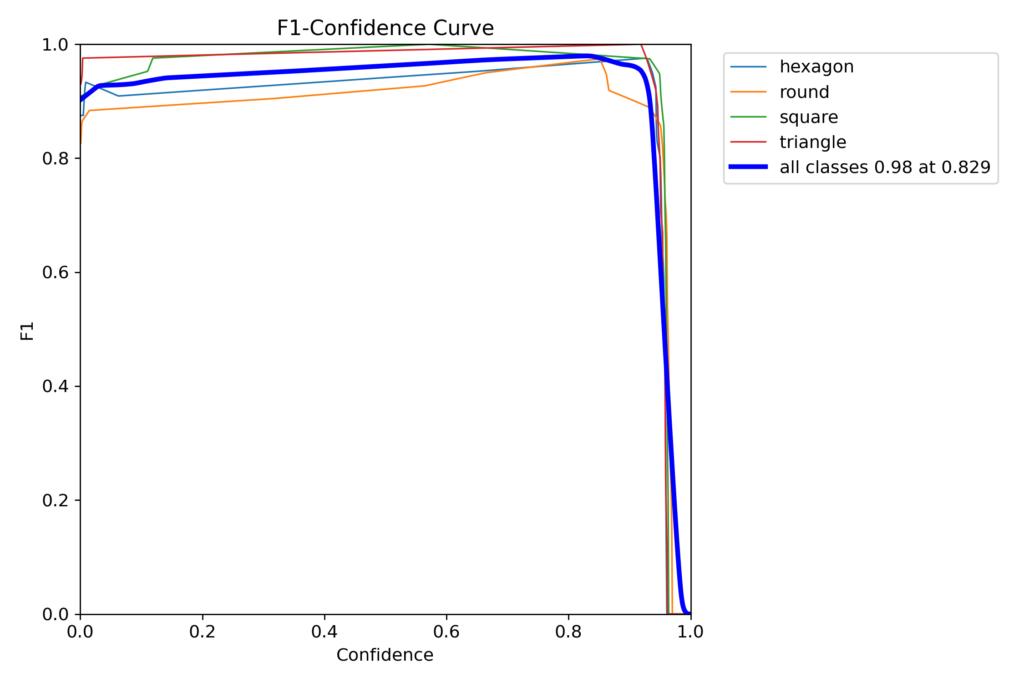
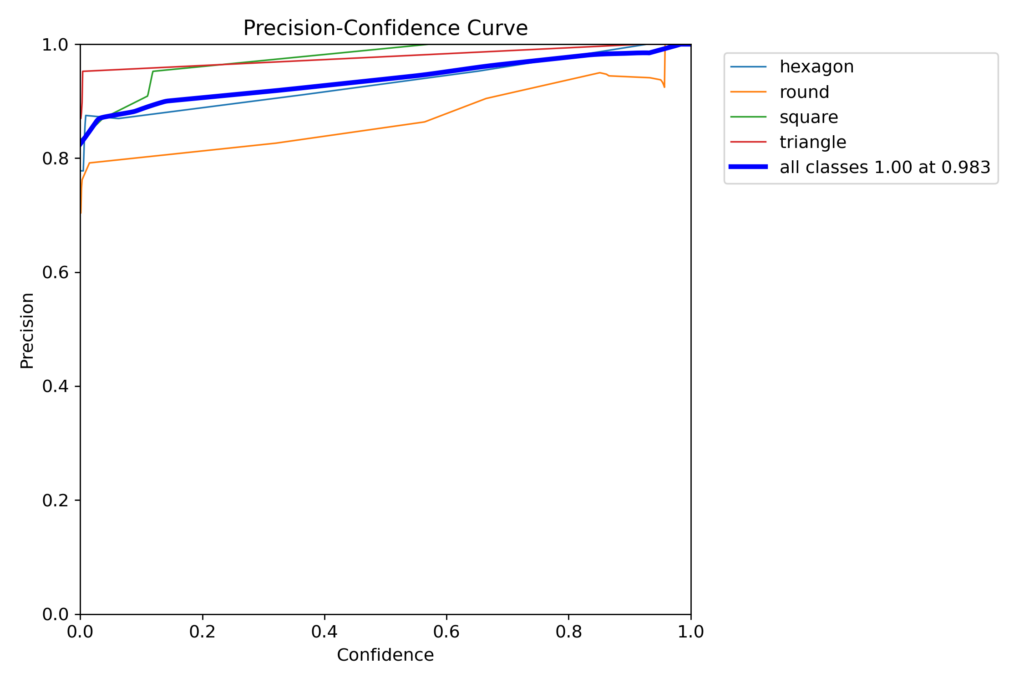
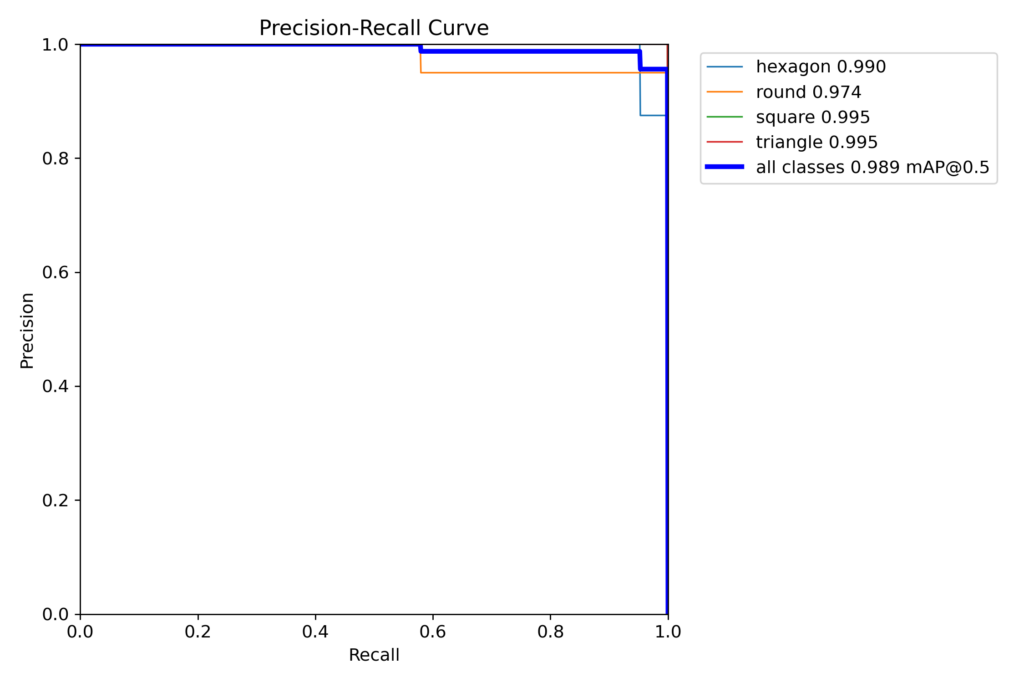
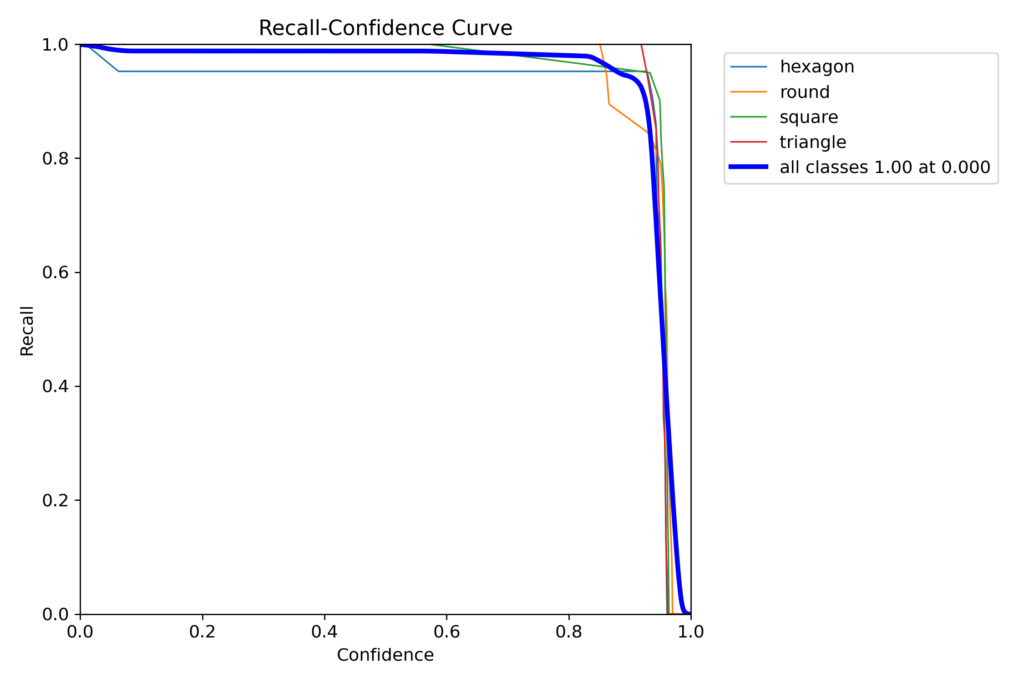
cette étape génère des métriques (mAP, précision, rappel) pour évaluer la qualité du modèle.
résultat :
Ultralytics YOLOv8.0.55 🚀 Python-3.8.5 torch-2.0.0+cu117 CUDA:0 (NVIDIA GeForce RTX 4070 Ti SUPER, 16069MiB)
Model summary (fused): 168 layers, 11127132 parameters, 0 gradients, 28.4 GFLOPs
val: Scanning /data/my_dataset/valid/labels.cache... 80 images, 0 backgrounds, 0 corrupt: 100%|██████████| 80/80 [00:00<?, ?it/s]
Class Images Instances Box(P R mAP50 mAP50-95): 100%|██████████| 5/5 [00:01<00:00, 3.80it/s]
all 80 80 0.978 0.98 0.989 0.921
hexagon 80 21 0.979 0.952 0.99 0.916
round 80 19 0.939 1 0.974 0.901
square 80 20 1 0.967 0.995 0.965
triangle 80 20 0.994 1 0.995 0.899
Speed: 1.8ms preprocess, 2.8ms inference, 0.0ms loss, 0.9ms postprocess per image
Results saved to /workspace/ultralytics/runs/detect/val
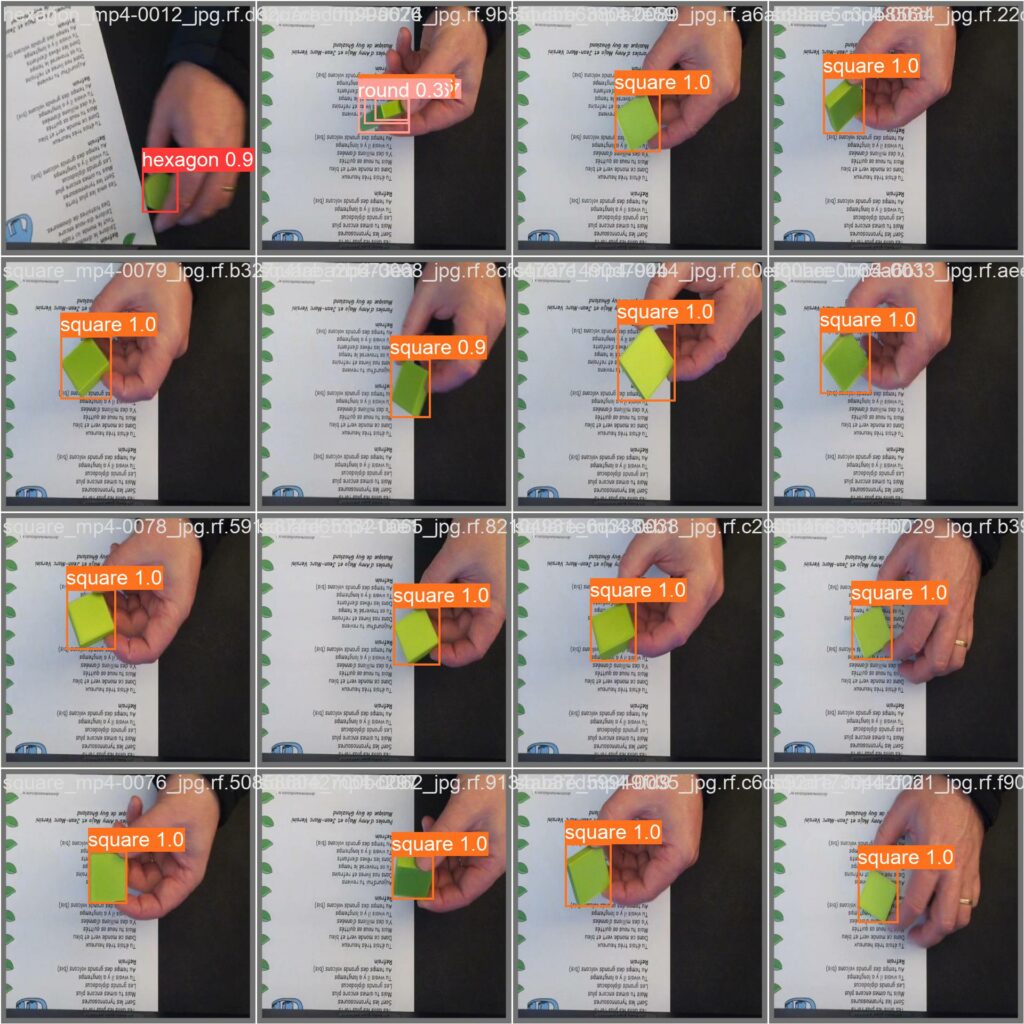
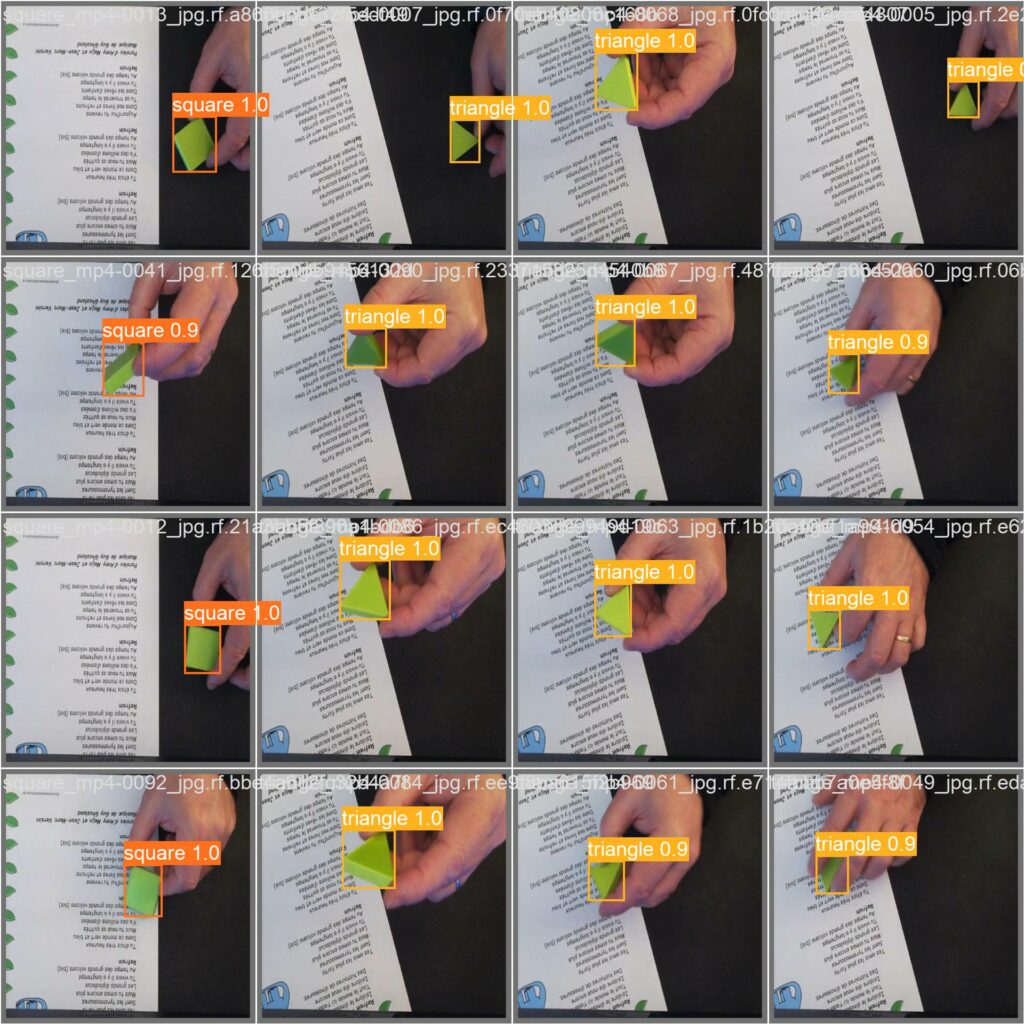
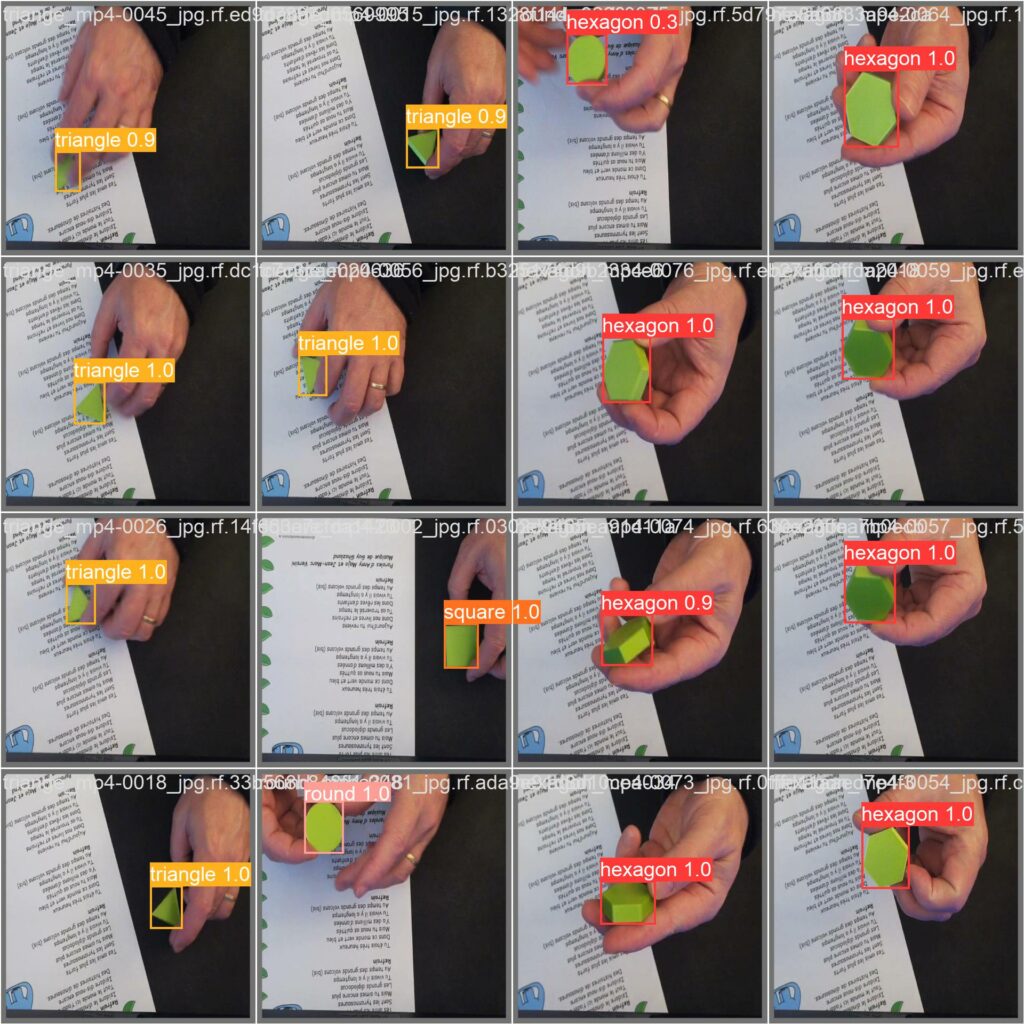
YOLO - Test d'inférence
yolo task=detect mode=predict model=/workspace/ultralytics/runs/detect/train/weights/best.pt conf=0.25 source=/data/my_dataset/test/images save=True
👉 Objectif : Exécuter le modèle entraîné (best.pt) sur des nouvelles images avec une confiance minimale de 0.25.
Cette étape sauvegarde les résultats sous forme d’images (images annotées avec les prédictions).
résultat :
Ultralytics YOLOv8.0.55 🚀 Python-3.8.5 torch-2.0.0+cu117 CUDA:0 (NVIDIA GeForce RTX 4070 Ti SUPER, 16069MiB)
Model summary (fused): 168 layers, 11127132 parameters, 0 gradients, 28.4 GFLOPs
image 1/40 ../../hexagon_mp4-0003_jpg.rf.c293d0bda8579255c22e0bb3adec7517.jpg: 640x640 1 hexagon, 6.0ms
image 2/40 ../../hexagon_mp4-0004_jpg.rf.cc7bd017125af4dbd404019b3770f394.jpg: 640x640 1 hexagon, 4.6ms
image 3/40 ../../hexagon_mp4-0008_jpg.rf.4fd6e77433c04562e72f935866ce0f6f.jpg: 640x640 1 hexagon, 4.5ms
image 4/40 ../../hexagon_mp4-0019_jpg.rf.7d1cf963c7a1ec1475e9835eb22823fe.jpg: 640x640 1 hexagon, 4.4ms
../..
image 18/40 ../../round_mp4-0072_jpg.rf.a7b124ffd4ac510cb800640b2662692c.jpg: 640x640 1 round, 5.2ms
image 19/40 ../../round_mp4-0073_jpg.rf.17cc51715ce2f318fbe54c4cf027eb25.jpg: 640x640 1 round, 4.4ms
image 20/40 ../../round_mp4-0079_jpg.rf.726d39195525a9379b7a0d027cc95fa2.jpg: 640x640 1 round, 5.3ms
image 21/40 ../../square_mp4-0008_jpg.rf.2de6b97777c35ad77243686b52db8fdd.jpg: 640x640 1 square, 4.3ms
image 22/40 ../../square_mp4-0031_jpg.rf.51e2987542775d7b404283d2555c1e89.jpg: 640x640 1 square, 4.4ms
../..
image 38/40 ../../triange_mp4-0093_jpg.rf.a5e21f5433c42886dfa68207bf33bcf4.jpg: 640x640 1 triangle, 4.3ms
image 39/40 ../../triange_mp4-0094_jpg.rf.ca41d949218064b2667407a288294d54.jpg: 640x640 1 triangle, 4.5ms
image 40/40 ../../triange_mp4-0097_jpg.rf.42740df0f5c5443d917efcfb888b12b6.jpg: 640x640 1 triangle, 4.4ms
Speed: 0.4ms preprocess, 4.9ms inference, 1.3ms postprocess per image at shape (1, 3, 640, 640)
Results saved to /workspace/ultralytics/runs/detect/predict
YOLO - Export du modèle au formant ONNX
ONNX (Open Neural Network Exchange) est un format standardisé pour représenter des modèles d’IA compatibles avec plusieurs frameworks (PyTorch, TensorFlow, Hailo, OpenVINO, etc.).
yolo export model=/workspace/ultralytics/runs/detect/train/weights/best.pt imgsz=640 format=onnx opset=11
👉 Objectif : Convertir le modèle best.pt en ONNX (format optimisé pour l’inférence sur des accélérateurs comme Hailo).
On spécifie une taille d’image de 640×640 et l’opset=11 (compatibilité avec certains moteurs d’inférence).
opset (Operator Set) définit un ensemble d’opérations que le modèle peut utiliser (par exemple : convolutions, normalisations, activations…).
‘opset=11’ est une version stable qui assure une compatibilité large avec la plupart des moteurs d’inférence comme Hailo
résultat :
ONNX: export success ✅ 0.7s, saved as /workspace/ultralytics/runs/detect/train/weights/best.onnx (42.7 MB)
YOLO - Sauvegarde
il est temps maintenant, de copier tous ces résultats en dehors du conteneur Docker dans lequel nous sommes :
Nous pouvons maintenant sortir de notre conteneur Docker YOLOv8
exit